

12-row weeding robot clears weeds autonomously

Dutch company Andela Techniek & Innovatie is developing a machine for robotic weed removal. A prototype – the 12-row ARW-912 – is running on an organic farm in the Netherlands in carrots and onions.
The weeding robot is especially designed for the removal of weeds in the row. The Andela Robot Weeder (ARW-912) has 12 weeding units for rows with a maximum distance of 75 centimetres between them.
The width of the all-aluminium machine is 9 metres, with a track undercarriage on 3 metres of track and a single steering wheel at the front. RTK GPS ensures that the weeding robot stays on course.
Text continues below video
Electrical power via solar panels
The electrical power for propulsion, for the calculation unit and for the steering and weeding system comes entirely from solar panels mounted on the roof. There are a total of 43 electric motors on the ARW-912.
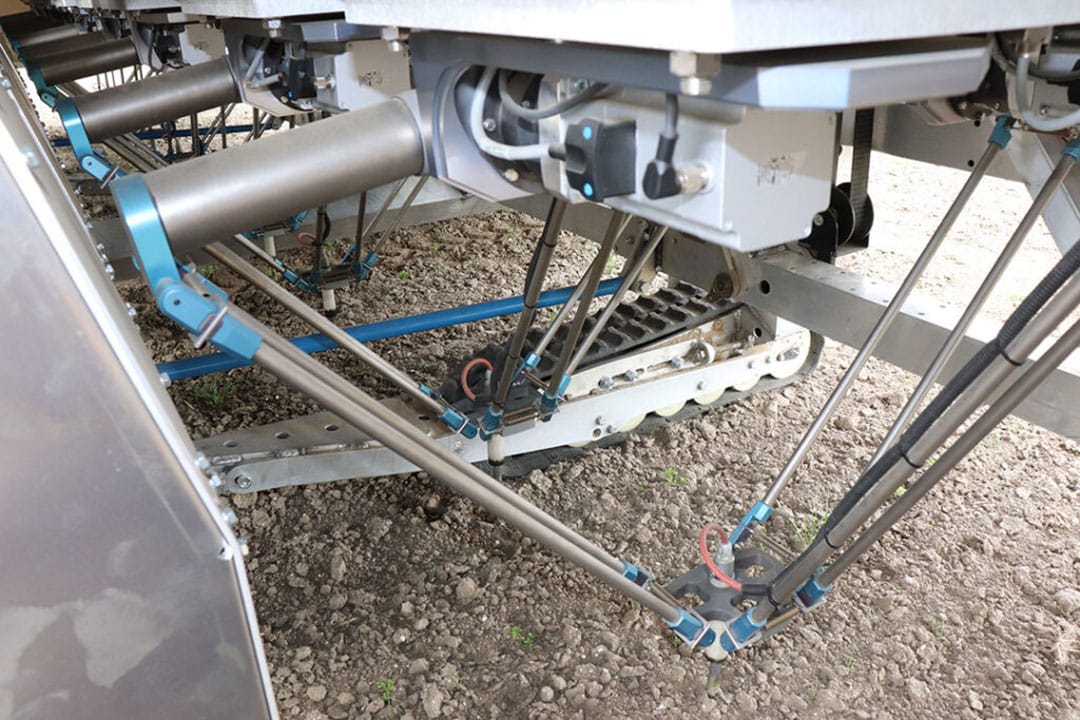
Delta arm targets weeds
The detection and destruction of the weeds works via an RGB camera in combination with a computer-controlled delta arm per crop row. Each camera ‘looks’ into the crop from above. This provides a stream of images of the cultivated and weeded plants. The plants are immediately compared with images of the crop and the weeds that are present in the dataset.
Each plant identified as a weed is given specific coordinates. These coordinates are used to control the delta arm. At the bottom of this arm is a stylus that touches the weed plant. This process takes a fraction of a second and is sufficient to raise the temperature to a level that is lethal for the plant.
The advantage is that the soil remains untouched, so that no seedbed is created for possible new weeds.
Text continues below image
Weeding robot for carrots, onions and chicory
In principle, the weeding robot can be used for each crop. At least, if a dataset of that specific crop is available with sufficient relevant images of the cultivated crop and of the possibly occurring weeds. Andela is currently focusing on carrots, onions and chicory.

Join 17,000+ subscribers
Subscribe to our newsletter to stay updated about all the need-to-know content in the agricultural sector, two times a week.






