

CottonSim advances robotic cotton harvesting with AI and GPS navigation
A team of U.S. researchers has taken a major step toward autonomous cotton harvesting with the development of CottonSim—a visually guided robot that successfully navigates through a virtual cotton field and detects cotton bolls using AI.
Cotton harvesting is one of the most labor-intensive and costly stages in cotton production. CottonSim demonstrates the potential of a robot, based on Clearpath Robotics’ Husky platform, that can autonomously traverse rows and identify cotton bolls using vision-based AI. This sets the stage for selective picking—harvesting only ripe bolls—potentially reducing waste and increasing lint quality.
While this study focuses on simulated navigation and detection, not actual boll picking, it provides a realistic technological foundation. Harvesting capacity figures are not yet available, as the picking mechanism will be integrated in a future development stage. However, the robot’s configuration—combining GPS, LiDAR, RGB-D cameras, and a UR5e robotic arm—suggests strong potential for autonomous field deployment.
GPS beats map-based navigation
The researchers tested both GPS-based and map-based navigation within a fully modeled ROS-Gazebo cotton farm environment. The GPS-based system outperformed the map-based one, achieving 100% completion with zero deviation and finishing the navigation task over 10 minutes faster. Visual support came from the YOLOv8n-seg model, which segmented the environment into ‘sky’, ‘ground’, and ‘cotton plants’ with 93.0% precision and 88.9% recall.
Next step: picking real cotton
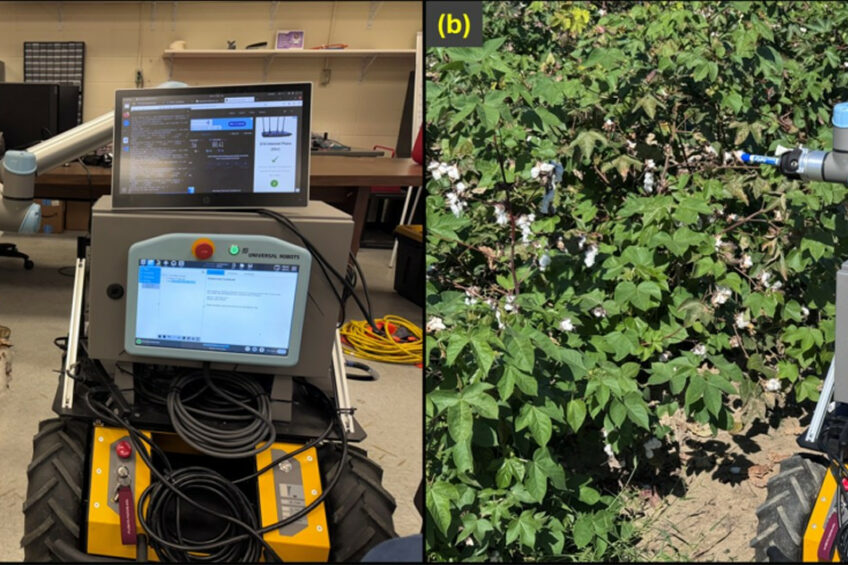
Future work will integrate the cotton-picking mechanism into CottonSim and test the system in real-world fields. Enhancements to navigation—such as 3D SLAM, visual odometry, and improved turn efficiency—are planned to reduce GPS drift and improve localization. Meanwhile, the physical prototype is already under development and being evaluated in both laboratory and field settings.
Join 17,000+ subscribers
Subscribe to our newsletter to stay updated about all the need-to-know content in the agricultural sector, two times a week.






