

Penn Sate develops mushroom picking and trimming robot

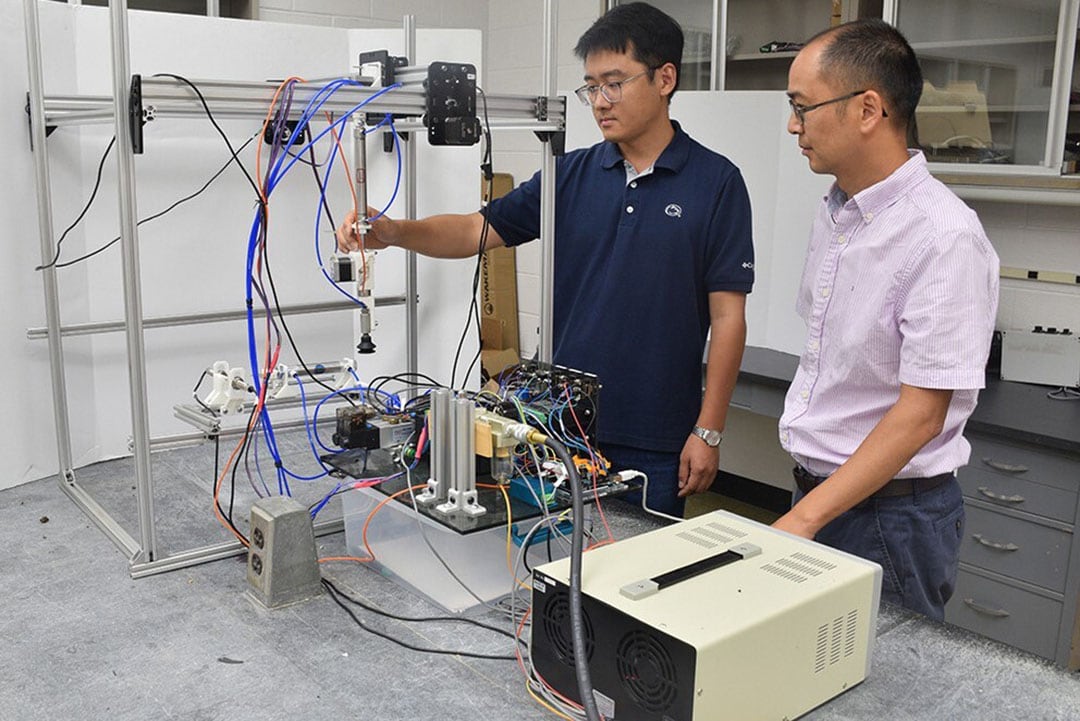
The prototype, which is designed to be integrated with a machine vision system, showed that it is capable of both picking and trimming mushrooms growing in a shelf system.
Researchers in Penn State’s College of Agricultural Sciences have developed a robotic mechanism for mushroom picking and trimming. The mushroom picker is to make automated harvesting of button mushrooms possible.
Labour shortages and rising labour costs
According to Long He, assistant professor of agricultural and biological engineering, the mushroom industry has been facing labour shortages and rising labour costs. Labour costs for mushroom harvesting account for 15% to 30% of the production value, says He. Mechanical or robotic picking can help alleviate those problems.
Text continues underneath image
Robotic mushroom-picking mechanism
The researchers designed a robotic mushroom-picking mechanism that included a picking “end-effector” based on a bending motion, a “4-degree-of-freedom positioning” end-effector for moving the picking end-effector, a mushroom stipe-trimming end-effector, and an electro-pneumatic control system. They fabricated a laboratory-scale prototype to validate the performance of the mechanism.
The research team used a suction cup mechanism to latch onto mushrooms and conducted bruise tests on the mushroom caps to analyze the influence of air pressure and acting time of the suction cup.
Text continues underneath image

Test results
The test results, recently published in Transactions of the American Society of Agricultural and Biological Engineers, showed that the picking end-effector was successfully positioned to the target locations and its success rate was 90% at first pick, increasing to 94.2% after second pick.
The trimming end-effector achieved a success rate of 97% overall. The bruise tests indicated that the air pressure was the main factor affecting the bruise level, compared to the suction-cup acting time, and an optimized suction cup may help to alleviate the bruise damage, the researchers noted.
According to Penn State, the laboratory test results indicated that the developed picking mechanism has potential to be implemented in automatic mushroom harvesting.






